シリーズ:実験シリーズ(フェーズ3)
対応ロードマップ:フェーズ3 / E3-01
この記事で扱う範囲:E3-00 で確定した配線条件を使い、I2Cアドレス 0x68 に対して応答があることを確認する。まずは「接続できている」を確認するところまでを扱う。
1. 目的
今回は、I2Cで接続した IMU に対して、マイコンから応答があるか を確認します。
前回の E3-00 で、
- QCIOT-ICM42688P の J1 を評価ボードの Pmod1(J26)へ接続する
- 評価ボード側は SW4-1 = OFF、SW4-2 = ON にする
- QCIOT-ICM42688P の J4 にジャンパキャップが付いている
- その結果、I2Cアドレスは 0x68 になる
という条件を先に固めました。
今回は、その前提で 0x68 に対して通信を試し、IMUとI2Cで接続できているか確認する のが目的です。
今回の段階では、まだ加速度やジャイロの値は読みません。
まずは 「0x68 に応答がある」 と確認できれば十分です。
2. 前提・環境
2-1. 前提
この記事は、次の内容が終わっている前提で進めます。
- フェーズ0:ビルド / 書き込み / main到達 / UARTログ出力
- E2-02:1msごとの時刻を作る
- E2-03:周期処理
- E2-05:状態で整理(IDLE / RUN / ERROR)
- E3-00:I2C配線の“詰まりどころ”を先に潰す
2-2. 使用するもの
- 評価ボード:RTK7EKA8M2S00001BE
- e² studio + FSP
- Tera Term
- IMUモジュール:QCIOT-ICM42688P(PMOD BOARD ICM-42688-P)
- USB-UART変換ケーブル(またはUSB-UART変換モジュール)
- ジャンパ線(UART接続用)
2-3. 今回の前提条件
今回は、前回(E3-00)の記事の条件をそのまま使います。
- 通信方式:I2C
- 接続方法:QCIOT-ICM42688P の J1 を評価ボードの Pmod1(J26)へ接続
- 評価ボード側設定:SW4-1 = OFF、SW4-2 = ON
- AD0:Low(J4 にジャンパキャップあり)
- I2Cアドレス:0x68
今回は、QCIOT-ICM42688P の J4 にジャンパキャップが付いているため、
AD0 は Low 側となり、I2C アドレスは 0x68 になります。
2-4. 今回の動作イメージ
今回は、起動後に I2C アドレス 0x68 に対して通信を試します。
- 応答があれば UART に成功ログを出す
- 応答がなければ UART に失敗ログを出す
今回確認したいのは、
「値を読む」前に、IMUが 0x68 で応答することです。
3. 今回の変更点
3-1. 配線変更
配線は E3-00 と同じです。
今回は新しい配線変更はありません。
- QCIOT-ICM42688P の J1 を評価ボードの Pmod1(J26)へ接続
- 評価ボード側は SW4-1 = OFF、SW4-2 = ON
- J4 にジャンパキャップあり
前回確定した条件で、そのまま接続確認します。
3-2. 設定変更
FSP で I2C Master を1つ追加します。
今回は、接続確認を目的にするため、次の設定で進めます。
- 通信方式:I2C Master
- アドレス幅:7bit
- 通信速度:100kHz
- Pmod1 を I2C として使うための SDA / SCL ピンを割り当てる
今回は I2C通信速度を 100kHz に設定します。
最初から高速設定にせず、まずは 安定して接続確認できること を優先します。
3-3. コード変更
今回は次の処理を追加します。
- I2C Master を Open する
- スレーブアドレスを 0x68 に設定する
- 0x68 に対して通信を試す
- 応答があったかどうかを UART に出す
今回はスキャンではなく、既知アドレス 0x68 に対して接続確認する 方針です。
これにより、「なぜこのアドレスを試すのか」が分かりやすくなります。
4. 手順
4-1. E3-00 の条件どおりに接続する
まず、前回の条件どおりに接続します。
- QCIOT-ICM42688P の J1 を評価ボードの Pmod1(J26)へ接続
- SW4-1 = OFF
- SW4-2 = ON
- J4 にジャンパキャップあり
ここが崩れていると、今回の 0x68 応答確認も通りません。
4-2. プロジェクトを作成する
今回は、UARTログ出力ができる既存のプロジェクトをベースにして進めます。
このプロジェクトに、I2C Master の設定を追加して、IMUへの接続確認を行います。
次の記事の4章手順にて、4-2までの手順まで進めてください。このプロジェクトをベースに進めます。
※上記の記事の「4-3. コードを追加する(Helloを1回送信)」は対応不要です。
4-3. USB-UARTケーブルのUARTと評価ボードを接続する
次の記事の4-4章に従って、USB-UARTケーブルのUARTと評価ボードを接続します。
4-4. FSP で I2C Master を追加する
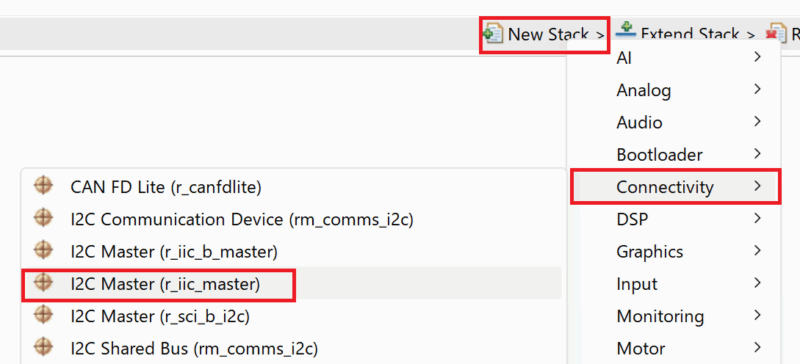
- FSP Configurationを開く
- 「Stacks」タブを開く
- 「New Stack」を押す
- 一覧からConnectivity → I2C Master(r_iic_master)を選び、1インスタンス追加する
※今回は、専用IICの端子に繋がっているため、r_iic_masterを選択しています。
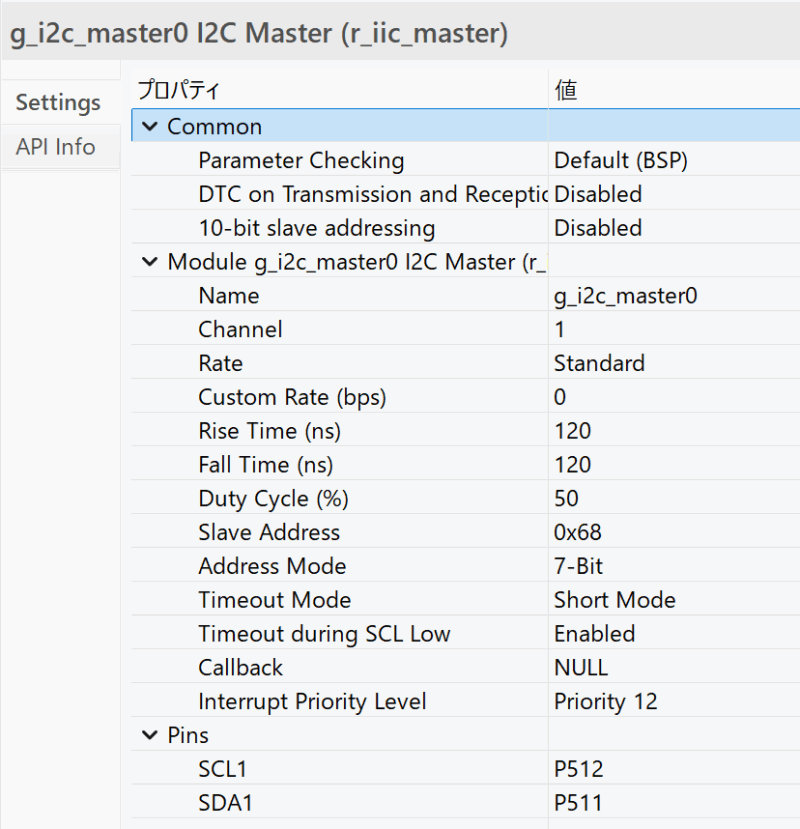
- 追加されたg_i2c_master0 I2C Master(r_iic_master)を選択し、プロパティを表示する
- 次の設定を行う
Channel:1
Rate:Standard ※100kHz
Slave Address:0x68
Address Mode:7-Bit
Callback:i2c_master_callback
4-5. UARTログを残す
接続確認では、結果を文字で見られた方が分かりやすいです。
今回も UART に
I2C check startACK at 0x68No ACK at 0x68
のようなログを出力する形にします。
5. コード
※下記は考え方を分かりやすくするためのシンプルな例です。
※ I2Cインスタンス名、UART送信関数名、コールバックの有無は、自分のプロジェクトに合わせて置き換えてください。
#include "hal_data.h"
#include <stdio.h>
#include <string.h>
#include <stdbool.h>
#define IMU_I2C_ADDR (0x68U)
#define I2C_TIMEOUT_COUNT (100000U)
static volatile bool g_i2c_done = false;
static volatile bool g_i2c_error = false;
static void uart_print(const char * p_text);
static bool imu_check_ack(uint8_t addr);
void i2c_master_callback(i2c_master_callback_args_t * p_args)
{
if (NULL == p_args)
{
return;
}
switch (p_args->event)
{
case I2C_MASTER_EVENT_ABORTED:
{
g_i2c_error = true;
g_i2c_done = true;
break;
}
case I2C_MASTER_EVENT_RX_COMPLETE:
case I2C_MASTER_EVENT_TX_COMPLETE:
{
g_i2c_error = false;
g_i2c_done = true;
break;
}
default:
{
break;
}
}
}
void hal_entry(void)
{
fsp_err_t err;
/* UART Open */
err = R_SCI_B_UART_Open(&g_uart0_ctrl, &g_uart0_cfg);
if (FSP_SUCCESS != err)
{
while (1)
{
;
}
}
uart_print("I2C check start\r\n");
err = R_IIC_MASTER_Open(&g_i2c_master0_ctrl, &g_i2c_master0_cfg);
if (FSP_SUCCESS != err)
{
uart_print("I2C open error\r\n");
while (1)
{
;
}
}
if (imu_check_ack(IMU_I2C_ADDR))
{
uart_print("ACK at 0x68\r\n");
}
else
{
uart_print("No ACK at 0x68\r\n");
}
while (1)
{
;
}
}
static bool imu_check_ack(uint8_t addr)
{
fsp_err_t err;
uint8_t dummy = 0x00;
uint32_t timeout = I2C_TIMEOUT_COUNT;
g_i2c_done = false;
g_i2c_error = false;
err = R_IIC_MASTER_SlaveAddressSet(&g_i2c_master0_ctrl,
addr,
I2C_MASTER_ADDR_MODE_7BIT);
if (FSP_SUCCESS != err)
{
return false;
}
err = R_IIC_MASTER_Write(&g_i2c_master0_ctrl, &dummy, 1U, false);
if (FSP_SUCCESS != err)
{
return false;
}
while ((false == g_i2c_done) && (timeout > 0U))
{
timeout--;
}
if (0U == timeout)
{
return false;
}
if (true == g_i2c_error)
{
return false;
}
return true;
}
static void uart_print(const char * p_text)
{
fsp_err_t err;
err = R_SCI_B_UART_Write(&g_uart0_ctrl, (uint8_t *) p_text, strlen(p_text));
if (FSP_SUCCESS != err)
{
while (1)
{
;
}
}
for (volatile uint32_t i = 0; i < 1000000U; i++)
{
__asm volatile ("nop");
}
}6. 実行結果
6-1. 確認したい動き
今回の実験では、次のようなログになればOKです。
I2C check start
ACK at 0x68このログが出れば、
- I2C Master が動いている
- 0x68 に応答がある
- IMU と I2C で接続できている
と判断できます。
6-2. 今回確認できればよいこと
今回の段階では、次が確認できれば十分です。
- 0x68 に対して応答がある
- I2C の基本配線と基本通信が通っている
7. ハマりポイント/原因と対策
7-1. No ACK at 0x68 になる
原因
- Pmod1 が I2C モードになっていない
- J1 が正しく接続できていない
- J4 の状態が想定と違う
- I2C ピン設定が違う
- 3.3V / GND 条件が崩れている
対策
- SW4-1 = OFF、SW4-2 = ON になっているか確認する
- QCIOT-ICM42688P の J1 を評価ボード側へ接続しているか確認する
- J4 にジャンパキャップが付いているか確認する
- FSP で SDA / SCL ピン割り当てを確認する
- 必要ならテスターで 3.3V と GND を確認する
7-2. I2C open error になる
原因
- I2C Master スタック設定が不足している
- ピン設定が終わっていない
- Generate Project Content が未実行
対策
- FSP設定を見直す
- SDA / SCL が割り当て済みか確認する
- 生成コードを更新してビルドし直す
7-3. 0x68 で応答しないので、0x69 かもしれないと思って迷う
原因
- J4 の状態を確認しないまま進めている
対策
- QCIOT-ICM42688P の J4 を見て、ジャンパキャップが付いているか確認する
- 今回の記事どおりに進める場合は、J4 にキャップが付いている状態で使う
- この状態では、I2C アドレスは 0x68 になる
- 0x69 を疑う前に、まず J4 の状態を確認する
8. 今回わかったこと
今回の実験で大事なのは、
I2C接続確認では、アドレスをあいまいにせず、既知アドレスに対して応答確認した方が初心者には分かりやすい
ということです。
今回は E3-00 で
- 接続方法
- SW4 の設定
- J4 の状態
- I2Cアドレス
を先に固めたので、E3-01 では「なぜ 0x68 を試すのか」が明確な状態で進められます。
9. 次回やること
E3-02 1レジスタ読み:WHO_AM_I を読んで、相手が ICM-42688-P であることを確認する
10. 関連リンク
- 実験シリーズ:E2-02 タイマで1ms毎にカウントアップするストップウォッチを作る(リンク)
- 実験シリーズ:E2-03 タイマで周期処理(リンク)
- 実験シリーズ:E2-05 状態で整理(IDLE / RUN / ERROR)(リンク)
- 実験シリーズ:E3-00 I2C配線の“詰まりどころ”を先に潰す(リンク)
- 基礎シリーズ:電気回路 はじめに読む(リンク)
- 基礎シリーズ:電子回路 はじめに読む(リンク)
- 基礎シリーズ:GNDとは?なぜ基準点が必要なのか?(リンク)
- 基礎シリーズ:マイコン(RA8M2) はじめに読む(リンク)