シリーズ:実験シリーズ(フェーズ4)
対応ロードマップ:フェーズ4 / E4-01
この記事で扱う範囲:PWMの周期とパルス幅の関係を確認し、DS3218サーボに真ん中付近の位置へ移動させるPWMを出します。今回は、サーボを大きく動かすことが目的ではありません。まずは、サーボを安全に接続し、PWM信号で制御する入口を作ります。
1. 目的
今回は、フェーズ4の最初として、PWMでサーボを動かすための基礎を作ります。
フェーズ3では、IMUを使って姿勢を読み、異常姿勢を検出したら ERROR に移る安全停止の流れを作りました。
フェーズ4では、いよいよロボットを実際に動かす部品である サーボ を扱います。
ただし、最初からサーボを大きく動かすと危険です。
サーボはLEDやセンサと違い、
- 急に動く
- 力が強い
- 電流を多く使う
- 配線ミスで電源や部品を壊す可能性がある
という注意点があります。
そのため今回は、最初の実験として、
PWMとは何かを知る
↓
周期とパルス幅の関係を理解する
↓
サーボ用の別電源を用意する
↓
評価ボードとサーボ電源のGNDを共通にする
↓
サーボを真ん中付近の位置へ移動させるPWMを1つ出す
↓
サーボが大きく暴れないことを確認するという流れで進めます。
今回のゴールは、サーボの可動範囲を調べることではありません。
まずは、
- PWMの周期が分かる
- パルス幅でサーボの位置が変わることが分かる
- サーボ電源を評価ボードとは別にする理由が分かる
- GND共通が必要な理由が分かる
- サーボを真ん中付近の位置へ移動させるPWMを出せる
ところまでを確認します。
2. 前提・環境
2-1. 前提
この記事は、次の内容が終わっている前提で進めます。
- フェーズ0:ビルド / 書き込み / main到達 / UARTログ出力
- フェーズ1:GPIO出力の基本
- E2-02:1msごとの時刻を作る
- E2-03:周期処理
- E2-05:状態で整理(IDLE / RUN / ERROR)
- E3-07:異常姿勢時に安全停止へ移る考え方を確認している
今回からサーボを扱います。
サーボは、評価ボードの3.3Vピンや5Vピンから直接電源を取らず、
サーボ用の別電源 を使います。
2-2. 使用するもの
- 評価ボード:RTK7EKA8M2S00001BE
- e² studio + FSP
- Tera Term
- サーボ:DS3218
- UBEC:HENGE ハイボルテージ対応 UBEC
- 入力電圧:7V - 25.5V
- 対応:2-6S LiPo / 6-16セル Ni-Mh
- 出力電圧:5V / 8A または 6V / 8A
- 電流:8A、ピーク時12A(15秒未満)
- 重量:16g
- サイズ:45 x 22 x 7.5mm
- バッテリー:URGENEX 7.4V 1000mAh LiPo Battery 2S 35C JST Plug
- メス-メスジャンパ線、メス-片側バラ線ジャンパ
- WFR-2BP、WFR-3BP
- SFE-ROB-19224
- サーボ延長ケーブル、またはサーボ信号線を取り出せる配線
- 可能であればテスター
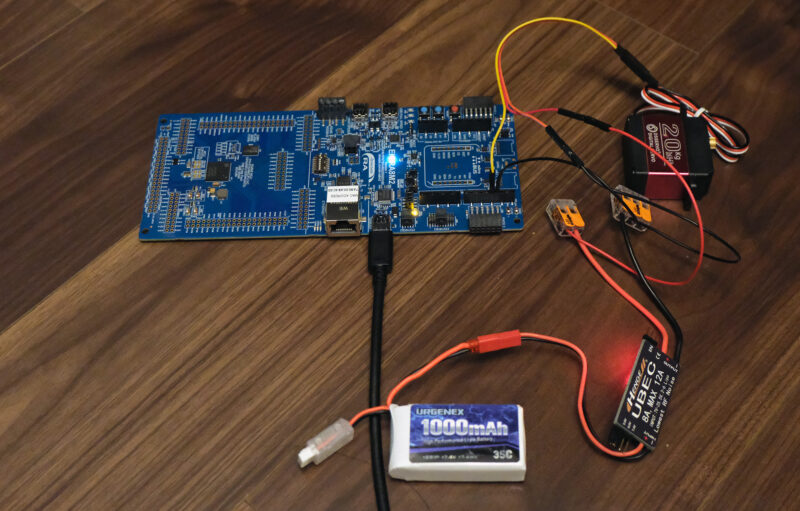
2-3. 今回の電源構成
今回は、次のように電源を分けます。
RA8M2評価ボード
└─ USB / デバッガ側から給電
DS3218サーボ
└─ LiPoバッテリー → UBEC → サーボ電源重要なのは、次の点です。
評価ボードの電源でサーボを動かさないサーボは動き出す瞬間に大きな電流を使います。
評価ボードから直接サーボ電源を取ると、電圧が下がったり、評価ボードがリセットしたり、最悪の場合は壊れる可能性があります。
そのため、サーボの赤線と茶色線、または赤線と黒線は、UBEC側につなぎます。
評価ボードからサーボへ出すのは、基本的に PWM信号線 です。
PWM信号を正しく伝えるために、評価ボードのGNDとUBEC側のGNDは共通にします。
2-4. UBECの出力電圧について
今回使うUBECは、出力を 5V または 6V にできるものです。
DS3218は高トルクのサーボなので、6Vで使う場面もあります。
ただし、最初の実験では、サーボを大きく動かすことが目的ではありません。
そのため、最初は安全側として 5V出力 から始める方がよいです。
最初の確認:5V出力
動作確認後:必要に応じて6V出力を検討6Vにすると力が出やすくなる一方で、動作も強くなります。
初心者向けの最初の実験では、まず5Vで真ん中付近のPWMを出し、配線と信号が正しいことを確認します。
2-5. LiPoバッテリーの注意
LiPoバッテリーは、扱いを間違えると危険です。
最低限、次の点を守ります。
- ショートさせない
- 充電にはLiPo対応充電器を使う
- 膨らんだバッテリーは使わない
- 熱い、においがする、異常がある場合はすぐ使用をやめる
- 実験中は目を離さない
- 配線変更は、バッテリーを外してから行う
今回の実験では、サーボが大きく動かないように真ん中付近のPWMだけを出します。
それでも、電源を入れた瞬間にサーボが少し動くことがあります。
サーボホーンを付ける場合は、指やケーブルを巻き込まない向きにしておきます。
3. 今回の変更点
3-1. 配線変更
今回は、フェーズ3までのIMU配線とは別に、サーボを接続します。
基本の接続は次の通りです。
LiPoバッテリー
↓
UBEC
↓
DS3218サーボの電源線評価ボードとサーボの接続は、次の3本を意識します。
| サーボ側 | 接続先 | 役割 |
|---|---|---|
| 赤線 | UBECの +5V または +6V | サーボ用電源 |
| 茶色線 / 黒線 | UBECのGND | サーボ用GND |
| 橙色線 / 黄色線 / 白線 | 評価ボードのPWM出力ピン | 制御信号 |
さらに重要なのが、次の接続です。
評価ボードのGND ─ UBECのGNDこれを 共通GND にします。
信号線だけをつないでも、GNDが共通でないと、サーボから見るとPWM信号の基準が分かりません。
その結果、動かない、たまに動く、変な動きをする、という原因になります。
3-2. 設定変更
今回は、FSPでPWM出力用のタイマを1つ追加します。
例として、GPTを使う前提で説明します。
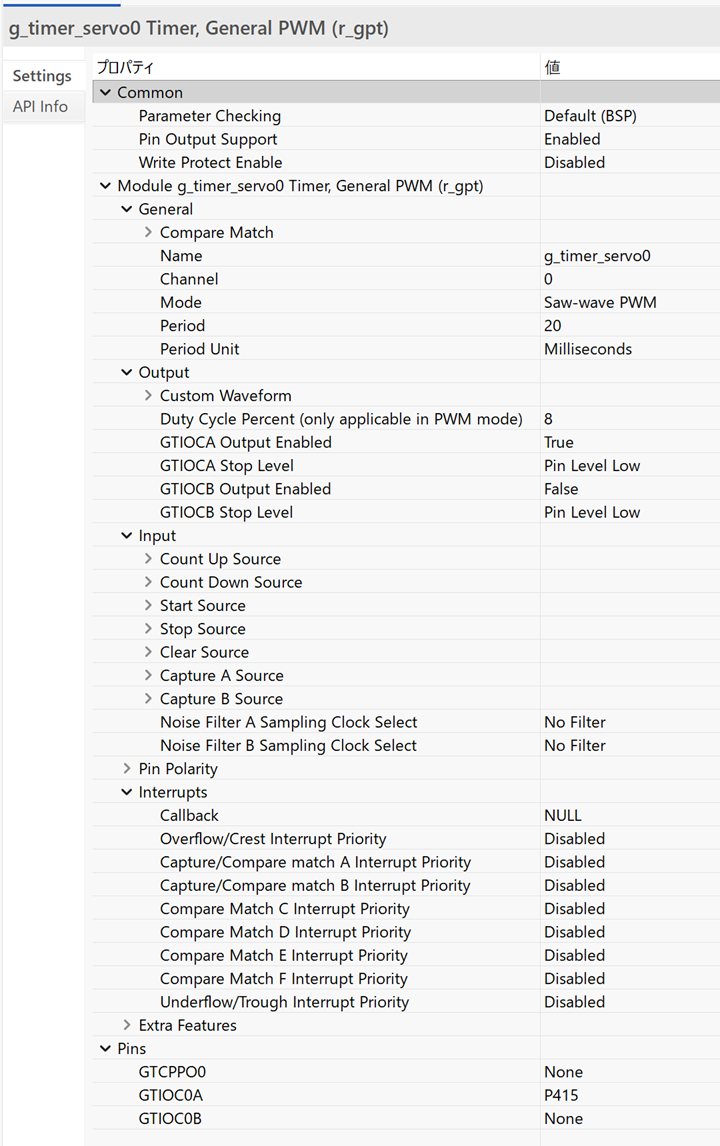
FSP Configuratorで、次のような設定にします。
PWM設定
| 項目 | 設定例 |
|---|---|
| Pin Output Support | Enabled |
| Name | g_timer_servo0 |
| Mode | Saw-wave PWM |
| Period | 20 |
| Period Unit | Milliseconds |
| Duty Cycle Percent | 8 |
| GTIOCA Output Enabled | True |
| GTIOCA Stop Level | Pin Level Low |
| GTIOCB Output Enabled | False |
| Callback | NULL |
Pin設定
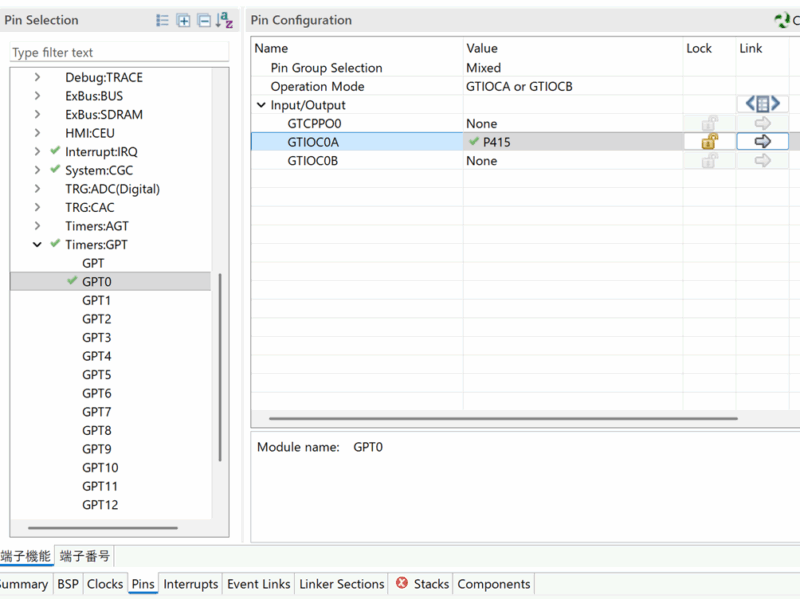
サーボ用PWMでは、一般的に次のような考え方を使います。
| パルス幅 | 意味の目安 |
|---|---|
| 約1.0ms | 片側 |
| 約1.5ms | 中立付近 |
| 約2.0ms | 反対側 |
ただし、これはあくまで目安です。
サーボによって安全な範囲は違います。
そのため今回は、いきなり1.0msや2.0msを出さず、まずは 1.5ms付近 だけを出します。
3-3. コード変更
今回は、次の処理を追加します。
- PWM用タイマをOpenする
- PWM周期を20msとして扱う
- パルス幅1500usを真ん中付近として設定する
- PWM出力をスタートする
- UARTログで、設定したパルス幅を表示する
今回の中心は、次の考え方です。
サーボ角度を直接指定しているのではなく、PWMのパルス幅を変えてサーボに位置を伝えているつまり、今回の段階では、
90度にしなさいと命令しているのではありません。
実際には、
20msごとに、1.5msだけHighになる信号を出すという信号を出しています。
サーボ側がそのPWM信号を見て、真ん中付近に動こうとします。
4. PWMとは何か
4-1. PWMはON/OFFの時間を変える信号
PWMは、信号を高速にON/OFFし、そのONの時間を変える方法です。
サーボでは、次のような信号を一定周期で出します。
周期:20msHighの時間:1.5msLowの時間:18.5msイメージは次の通りです。
High ┌────┐ ┌────┐
│ │ │ │
Low ──┘ └──────────────────┘ └────
←1.5ms→← 18.5ms →
← 20ms →この Highになっている時間 をパルス幅と呼びます。
4-2. サーボはパルス幅を見て位置を決める
サーボは、PWMの周期そのものよりも、主にパルス幅を見て位置を決めます。
そのため、サーボを動かすには、PWMの周期を大きく変えるのではなく、Highになっている時間、つまりパルス幅を変更します。
たとえば一般的なRCサーボでは、目安として次のようになります。
1.0ms付近 → 片側へ動く
1.5ms付近 → 真ん中付近へ動く
2.0ms付近 → 反対側へ動くただし、サーボによって実際の範囲は違います。
そのため、今回のE4-01では範囲を攻めません。
まずは真ん中付近の1.5msを出し、
PWMでサーボを制御する入口ができたことを確認します。
4-3. Duty比だけで考えると分かりにくい
PWMではDuty比という言葉も出てきます。
Duty比は、周期のうちHighになっている割合です。
たとえば、周期20msでパルス幅1.5msなら、
1.5ms / 20ms = 0.075なので、Duty比は約7.5%です。
ただし、サーボ制御では、初心者のうちはDuty比よりも、
パルス幅が何usかで考えた方が分かりやすいです。
今回も、コードでは次のように扱います。
1500usのパルスを出すこの方が、サーボの中立付近をイメージしやすくなります。
5. 配線
5-1. 基本の配線
今回の配線は、次のようになります。
URGENEX 7.4V LiPo
↓
HENGE UBEC
↓
DS3218サーボ電源評価ボードとの接続は次の通りです。
RA8M2 PWM出力ピン ── サーボ信号線
RA8M2 GND ── UBEC GND
UBEC +5V/+6V ── サーボ +電源
UBEC GND ── サーボ GND重要なのは、サーボの電源を評価ボードから取らないことです。
NG:評価ボードの3.3Vや5VからDS3218を動かす
OK:LiPo → UBEC → DS3218で動かす5-2. サーボの線の色
サーボの線色は製品によって違うことがあります。
よくある例は次の通りです。
| 線色 | 役割 |
|---|---|
| 赤 | 電源 + |
| 茶色 / 黒 | GND |
| 橙 / 黄 / 白 | 信号 |
ただし、必ず手元のサーボの表記や販売ページ、資料を確認してください。
線を間違えると、サーボや電源を壊す可能性があります。
5-3. 電源投入前チェック
電源を入れる前に、次を確認します。
- LiPoのプラスとマイナスを逆にしていない
- UBECの入力と出力を間違えていない
- UBECの出力が5V設定になっている
- サーボの赤線がUBECの+側につながっている
- サーボのGNDがUBECのGNDにつながっている
- 評価ボードのGNDとUBECのGNDがつながっている
- PWM信号線がサーボの信号線につながっている
- サーボホーンが机や指やケーブルに当たらない
- 配線変更中はLiPoを外している
可能であれば、サーボを接続する前に、テスターでUBECの出力電圧を確認します。
UBEC出力が5V設定なら、約5V付近になっていることを確認する6. 手順
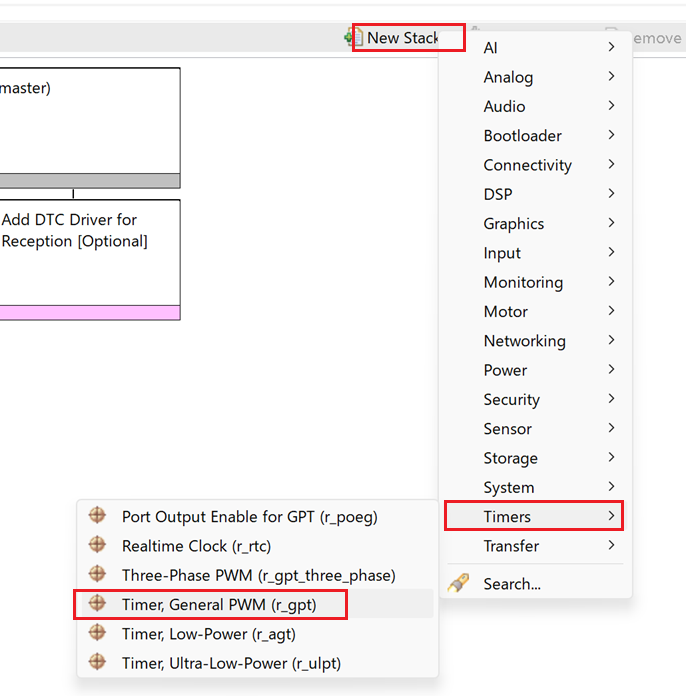
6-1. FSPでPWM用タイマを追加する
FSP Configuratorで、PWM出力用のGPTを追加します。
設定例は次の通りです。
Timer Driver:GPT
Mode:PWM
Period:20ms
PWM出力:GTIOCA または GTIOCB
Callback:今回は不要今回の実験では、PWM出力が1本あれば十分です。
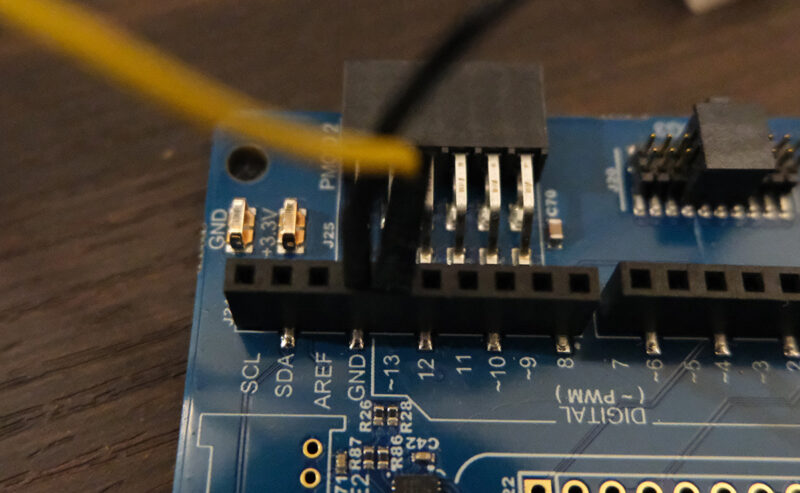
使用するピンは、評価ボードでGPTのPWM出力に割り当てできるピンを選びます。
実際のピン名は、FSP ConfiguratorのPins設定と、評価ボードのピン配置に合わせてください。
6-2. サーボをまだ接続せずに書き込む
最初は、サーボを接続しない状態でプログラムを書き込みます。
理由は、プログラムやPWM設定が間違っていた場合に、サーボが急に動くのを避けるためです。
まずは、
ビルドできる書き込めるUARTログが出るところまで確認します。
6-3. 電源を切ってサーボを接続する
次に、評価ボードとLiPoを外した状態で、サーボを接続します。
接続する順番は、次のようにすると安全です。
1. 評価ボードの電源を外す
2. LiPoを外す
3. UBECとサーボを接続する
4. 評価ボードGNDとUBEC GNDを接続する
5. 評価ボードのPWM出力ピンとサーボ信号線を接続する
6. 配線を確認する
7. 評価ボードを起動する
8. 最後にLiPoを接続する6-4. PWMを出して真ん中付近を確認する
プログラムを実行すると、PWM出力を開始します。
今回のコードでは、パルス幅を1500usに設定します。
PWM period = 20000 us
Servo pulse = 1500 usサーボが真ん中付近に少し動けば、PWM信号が伝わっている可能性が高いです。
ただし、サーボがすでに真ん中付近にある場合は、ほとんど動かないこともあります。
その場合でも、異音や大きな暴れがなければ、まずはOKです。
6-5. すぐ電源を切れる状態で確認する
初回は、次のようにします。
- サーボを手で押さえ込まない
- サーボホーンの近くに指を置かない
- ケーブルを巻き込まないようにする
- 異音、発熱、においがあればすぐLiPoを外す
今回は、動きを楽しむ回ではありません。
PWM信号を出せたサーボが大きく暴れない配線と電源の基本が確認できたここまで確認できれば十分です。
7. コード
※下記は考え方を分かりやすくするためのシンプルな例です。
※ GPTインスタンス名、UARTインスタンス名、PWM出力ピンは、自分のプロジェクトに合わせて置き換えてください。
※ ここでは g_timer_servo0_ctrl / g_timer_servo0_cfg という名前でPWM用タイマを作った想定にしています。
※ PWM出力ピンが GTIOCA か GTIOCB かは、FSPの設定に合わせて変更してください。
※ 今回は中立付近の1500usだけを出します。最小・最大方向へ動かすのは次回にします。
#include "hal_data.h"
#include <stdio.h>
#include <string.h>
#include <stdbool.h>
#include <stdint.h>
/*
* サーボPWMの基本設定
* 一般的なRCサーボでは 20ms周期、1.5ms付近が中立の目安。
*/
#define SERVO_PWM_PERIOD_US (20000U)
#define SERVO_NEUTRAL_PULSE_US (1500U)
/*
* 安全のため、E4-01では中立付近だけを出す。
* 最小/最大の確認はE4-02で行う。
*/
#define SERVO_TEST_PULSE_US (SERVO_NEUTRAL_PULSE_US)
/*
* PWM出力に使うピン。
* FSPで GTIOCA を使う場合は GPT_IO_PIN_GTIOCA、
* GTIOCB を使う場合は GPT_IO_PIN_GTIOCB に変更する。
*/
#define SERVO_PWM_OUTPUT_PIN (GPT_IO_PIN_GTIOCA)
static void uart_print(const char * p_text);
static bool servo_pwm_start(void);
static bool servo_pwm_set_pulse_us(uint32_t pulse_us);
void hal_entry(void)
{
fsp_err_t err;
char msg[120];
err = R_SCI_B_UART_Open(&g_uart0_ctrl, &g_uart0_cfg);
if (FSP_SUCCESS != err)
{
while (1)
{
;
}
}
uart_print("E4-01 PWM servo basic start\r\n");
if (!servo_pwm_start())
{
uart_print("Servo PWM start error\r\n");
while (1)
{
;
}
}
if (!servo_pwm_set_pulse_us(SERVO_TEST_PULSE_US))
{
uart_print("Servo PWM duty set error\r\n");
while (1)
{
;
}
}
snprintf(msg, sizeof(msg),
"PWM period=%lu us, pulse=%lu us\r\n",
(unsigned long)SERVO_PWM_PERIOD_US,
(unsigned long)SERVO_TEST_PULSE_US);
uart_print(msg);
uart_print("Servo neutral pulse output\r\n");
while (1)
{
/*
* E4-01では、中立付近のPWMを出したままにする。
* まだ角度を変えたり、往復動作させたりしない。
*/
}
}
static bool servo_pwm_start(void)
{
fsp_err_t err;
/*
* FSPで作成したPWM用GPTをOpenする。
* g_timer_servo0_ctrl / g_timer_servo0_cfg は、
* 自分のFSP設定名に合わせて変更する。
*/
err = R_GPT_Open(&g_timer_servo0_ctrl, &g_timer_servo0_cfg);
if (FSP_SUCCESS != err)
{
return false;
}
/*
* PWM出力を開始する。
* FSP側で周期20msに設定しておく。
*/
err = R_GPT_Start(&g_timer_servo0_ctrl);
if (FSP_SUCCESS != err)
{
return false;
}
return true;
}
static bool servo_pwm_set_pulse_us(uint32_t pulse_us)
{
fsp_err_t err;
timer_info_t timer_info;
uint32_t duty_counts;
/*
* 今回は安全のため、想定外に小さい/大きい値を受け付けない。
* E4-01では1500usだけを使うが、関数としては簡単な範囲チェックを入れておく。
*/
if ((pulse_us < 1000U) || (pulse_us > 2000U))
{
return false;
}
err = R_GPT_InfoGet(&g_timer_servo0_ctrl, &timer_info);
if (FSP_SUCCESS != err)
{
return false;
}
/*
* FSPのGPTは、Dutyをカウント値で設定する。
*
* 例:
* 周期 20ms のカウント数が timer_info.period_counts
* 出したいパルス幅が 1500us
*
* duty_counts = period_counts * 1500 / 20000
*/
duty_counts = (uint32_t)(((uint64_t)timer_info.period_counts * pulse_us) /
SERVO_PWM_PERIOD_US);
err = R_GPT_DutyCycleSet(&g_timer_servo0_ctrl,
duty_counts,
SERVO_PWM_OUTPUT_PIN);
if (FSP_SUCCESS != err)
{
return false;
}
return true;
}
static void uart_print(const char * p_text)
{
fsp_err_t err;
err = R_SCI_B_UART_Write(&g_uart0_ctrl,
(uint8_t *) p_text,
strlen(p_text));
if (FSP_SUCCESS != err)
{
while (1)
{
;
}
}
/*
* UART送信完了待ちの簡易版。
* 本格的にはUARTコールバックで送信完了を待つ形にする。
*/
for (volatile uint32_t i = 0; i < 1000000U; i++)
{
__asm volatile ("nop");
}
}8. コードの見方(今回大事なところだけ)
8-1. 20ms周期を使う
サーボ制御では、まず周期を決めます。
今回のコードでは、次のようにしています。
#define SERVO_PWM_PERIOD_US (20000U)20000us は、20msです。
つまり、次のような信号を繰り返します。
20msごとに1回パルスを出す8-2. 真ん中付近は1500us
今回のコードでは、中立付近のパルス幅を次のようにしています。
#define SERVO_NEUTRAL_PULSE_US (1500U)1500us は、1.5msです。
多くのRCサーボでは、1.5ms付近が中立位置の目安になります。
ただし、サーボの個体差や種類によって、完全な中心とは限りません。
正確な中心出しは、後のキャリブレーションで扱います。
8-3. Duty比ではなくパルス幅で考える
コードの中では、最終的にGPTへDutyのカウント値を設定しています。
duty_counts = (uint32_t)(((uint64_t)timer_info.period_counts * pulse_us) / SERVO_PWM_PERIOD_US);ここでやっていることは、次の計算です。
20msのうち、1500usだけHighにする初心者のうちは、
Duty比を何%にするかよりも、
パルス幅を何usにするかで考えた方が分かりやすいです。
たとえば、20ms周期で1500usなら、Duty比は約7.5%です。
しかし、サーボ制御では、
1500usを出していると考えた方が、次回以降の角度確認につながりやすくなります。
8-4. R_GPT_InfoGet() で周期カウントを取得する
GPTのDuty設定では、パルス幅をそのままusで渡すのではなく、タイマのカウント値に変換して渡します。
そのため、今回は R_GPT_InfoGet() で周期のカウント数を取得しています。
err = R_GPT_InfoGet(&g_timer_servo0_ctrl, &timer_info);その後、
timer_info.period_countsを使って、1500usに相当するカウント値を計算しています。
これにより、タイマの内部クロックの細かい値を直接意識しなくても、
「20ms中の1500us」という考え方で扱いやすくなります。
8-5. E4-01では動かし続けない
今回のコードでは、サーボを左右に動かす処理は入れていません。
while (1)
{
}真ん中付近のPWMを出したままにします。
今回は、サーボを動かして遊ぶのではなく、
PWM信号を出して、サーボが中立付近へ動くことを安全に確認する のが目的です。
そのため、今回は1.5msのパルス幅だけを使います。
サーボを最小・中立・最大へ動かす確認は、次回のE4-02で行います。
9. 実行結果
9-1. UARTログ
プログラムを実行すると、Tera Termには次のようなログが出ます。
E4-01 PWM servo basic start
PWM period=20000 us, pulse=1500 us
Servo neutral pulse outputこのログが出れば、少なくとも次の処理までは進んでいます。
- UART初期化
- PWM用GPTのOpen
- PWM用GPTのStart
- 1500us相当のDuty設定
9-2. サーボの動き
サーボは、電源を入れた瞬間やPWMを受け取った瞬間に、少し動くことがあります。
次のような状態なら、まずは正常と考えてよいです。
- サーボが中立付近に少し動く
- すでに中立付近にあるため、ほとんど動かない
- 大きく暴れない
- 異音が続かない
- UBECやバッテリーが熱くならない
- 評価ボードがリセットしない
今回は、角度が正確に90度になっているかは気にしません。
見るポイントは、
サーボが大きく暴れず、PWMで保持されているように見えるかです。
9-3. ここで無理に角度を変えない
この段階で、
1000usも試したい
2000usも試したい
動かしてみたいと思うかもしれません。
ただし、今回はまだ行いません。
理由は、サーボの取り付け状態やホーンの向きによっては、
端まで動かしたときに机や部品に当たる可能性があるためです。
10. ハマりポイント/原因と対策
10-1. サーボがまったく動かない
原因
- UBECからサーボへ電源が供給されていない
- UBECの入力側と出力側を間違えている
- LiPoバッテリーが接続されていない
- サーボの電源線とGND線を間違えている
- PWM信号線が正しいピンにつながっていない
- FSPでPWM出力ピンが有効になっていない
- 評価ボードGNDとUBEC GNDが共通になっていない
対策
- まずLiPoを外して、配線を見直す
- UBECの入力側がLiPo、出力側がサーボになっているか確認する
- 可能であれば、テスターでUBEC出力が約5Vになっているか確認する
- サーボの赤線が+、茶色/黒線がGNDになっているか確認する
- 評価ボードのPWMピンとサーボ信号線がつながっているか確認する
- 評価ボードGNDとUBEC GNDを必ずつなぐ
- FSP Configuratorで、PWM出力ピンがGPIOではなくGPT出力に割り当てられているか確認する
10-2. サーボがガタガタ震える
原因
- PWM周期が20msになっていない
- パルス幅が想定外の値になっている
- GNDが共通になっていない
- サーボ電源が不安定
- 配線が抜けかけている
- サーボに負荷がかかっている
対策
- FSPのPWM周期が20msになっているか確認する
- コードで
SERVO_TEST_PULSE_USが1500Uになっているか確認する - 評価ボードGNDとUBEC GNDをつなぎ直す
- サーボホーンが机や配線に当たっていないか確認する
- サーボを手で押さえ込まない
- いったんLiPoを外し、配線を挿し直してから再確認する
10-3. 評価ボードがリセットする
原因
- サーボ電源を評価ボードから取っている
- サーボの動作で電圧が下がっている
- GND配線が不安定
- サーボ電源とロジック電源の配線が混ざっている
- サーボの突入電流やノイズの影響を受けている
対策
- DS3218の電源は、評価ボードから取らず、LiPo → UBECから供給する
- 評価ボードはUSBまたはデバッガ側から給電する
- UBECのGNDと評価ボードのGNDだけを共通にする
- サーボ電源の+側を評価ボードの5Vや3.3Vへつながない
- まずは5V出力で確認する
- 配線が細すぎる、接触が悪い場合は見直す
10-4. サーボが急に大きく動いて怖い
原因
- 初回起動時にサーボの現在位置と中立指令がずれている
- サーボホーンの取り付け角度がずれている
- 以前の位置から中立へ戻ろうとしている
- 誤って1000usや2000usなどを出している
- FSPの周期設定が想定と違い、パルス幅がずれている
対策
- まずLiPoを外す
- コードが
1500Uだけを出す設定になっているか確認する - FSPの周期が20msになっているか確認する
- サーボホーンを外せる場合は、ホーンを外して中立確認する
- ホーンを付ける場合は、動いても机や指に当たらない向きにする
- E4-01では、最小/最大方向へ動かさない
10-5. ビルドエラーになる
原因
- PWM用GPTのインスタンス名がコードと合っていない
g_timer_servo0_ctrl/g_timer_servo0_cfgが存在しないGPT_IO_PIN_GTIOCAと実際の出力設定が合っていない- GPTドライバを追加していない
- FSPでGenerate Project Contentしていない
R_GPT_InfoGet()やR_GPT_DutyCycleSet()の引数が合っていない
対策
- FSPで作成したPWM用タイマの名前を確認する
- コード中の
g_timer_servo0_ctrl/g_timer_servo0_cfgを、自分のプロジェクトの名前に変更する - GTIOCAを使っているなら
GPT_IO_PIN_GTIOCA、GTIOCBを使っているならGPT_IO_PIN_GTIOCBにする - FSPでGPTドライバを追加したあと、Generate Project Contentを実行する
- 生成された
hal_data.hに、PWM用タイマの定義があるか確認する
10-6. ログは出るがサーボが反応しない
原因
- PWMタイマはStartしているが、ピンに出力されていない
- FSPのPins設定でPWM出力が有効になっていない
- サーボ信号線が違うピンにつながっている
- サーボ信号線とGNDの基準が共通になっていない
- サーボ側が3.3VのPWM信号を認識できていない可能性がある
対策
- FSP ConfiguratorのPins設定で、使用ピンがGPT出力になっているか確認する
- 実際につないでいる評価ボードのピンが、FSPで設定したPWM出力ピンと同じか確認する
- 評価ボードGNDとUBEC GNDを共通にする
- 別のPWM出力ピンに変更して試す
- 可能であれば、ロジックアナライザやオシロスコープでPWMが出ているか確認する
- 3.3V信号で反応しない場合は、信号レベル変換が必要かを検討する
10-7. UBECやバッテリーが熱い、においがする
原因
- 配線ミスでショートしている
- サーボ電源の+とGNDを逆にしている
- サーボがロックして大きな電流が流れている
- サーボホーンが何かに当たって動けない
- バッテリーやUBECに異常がある
対策
- すぐにLiPoを外す
- すぐに触り続けず、熱が下がるのを待つ
- 配線を最初から確認し直す
- サーボホーンが引っかかっていないか確認する
- 異常が続く部品は使わない
- 原因が分からないまま再接続しない
11. 今回わかったこと
今回の実験で大事なのは、
サーボはPWMのパルス幅で制御する ということです。
LEDのように単純にON/OFFするのではなく、サーボには次のような信号を送ります。
20ms周期で、1.5msだけHighにするこのパルス幅を変えることで、サーボの位置が変わります。
今回できるようになったことは、次の通りです。
- PWMの周期とパルス幅の関係を理解した
- サーボ制御では、Duty比よりパルス幅で考えると分かりやすいことを確認した
- DS3218を評価ボードから直接給電しない理由を確認した
- LiPo → UBEC → サーボという電源構成を作った
- 評価ボードとUBECのGNDを共通にする必要を確認した
- GPTで20ms周期のPWMを出す入口を作った
- 中立付近の1500usパルスを出した
12. 次回やること
次回は、E4-02 サーボ1軸(中立/最小/最大) に進みます。
今回のE4-01では、1500usの中立付近だけを出しました。
次回は、サーボを安全に動かすために、
1500us 中立付近少し小さい値少し大きい値のように、少しずつパルス幅を変えて確認します。
いきなり1000usや2000usへ動かすのではなく、
サーボの動きを見ながら安全な範囲を探します。
最終的には、次のE4-03で使うための、
このサーボでは、どこまで動かしてよいかを決める準備をします。
13. 関連リンク
- E3-07:異常姿勢判定→安全停止
- E4-02:サーボ1軸(中立/最小/最大)
- E4-03:安全範囲(保護)
- E4-08:サーボ電源の落とし穴→対策
- 基礎シリーズ:PWMとは?周期とパルス幅でサーボを動かす考え方
- 基礎シリーズ:サーボモータとは?
- 基礎シリーズ:GNDとは?なぜ基準点が必要なのか?
- 基礎シリーズ:ショートとは?電源の扱いと安全の基本
- 基礎シリーズ:電圧・電流・抵抗の超要点
- 基礎シリーズ:LiPoバッテリーの安全な扱い方(予定)